При створенні нових зразків радіотехнічних систем моніторингу повітряного простору та радіолокації виникає проблема визначення їх технічних характеристик і можливостей та їх верифікації. Використання для цього реальних повітряних цілей доцільне на кінцевих кроках відпрацювання систем, скільки воно потребує значних матеріально технічних та економічних витрат. Використання ж для цих цілей імітаторів рухомих цілей дозволяє провести детальний аналіз досягнутих технічних характеристик систем та їх верифікацію одночасно спростивши цей процес та зменшив його вартість.
Шляхи реалізації різного типу імітаторів, які дозволяють розроблені наразі сучасні технології і буде розглянуто в цій роботі.
Одним з напрямків створення імітаторів є використання сучасних малогабаритних і відносно дешевих рухомих носіїв, наприклад, у вигляді квадрокоптерів спільно з еталонними відбивачами. В той час, коли носій забезпечує при випробуваннях потрібну згідно методики випробувань швидкість та траєкторію переміщення відносно системи моніторингу довкілля, то еталонний відбивач імітує таку ж, як у реальних цілей ЕПР.
Добре зарекомендували себе мультикоптери. Вони широко застосовуються, як для ведення розвідки, так і для вирішення інших завдань. Зокрема можуть бути використані для виконання робіт по валідації систем моніторингу простору. Цьому сприяє ряд переваг які мають коптери. На відміну від, наприклад, дрону літакового типу, який потребує значної інфраструктури для його запуску, мультикоптерні дрони здатні виконувати зліт-посадку в дуже обмеженому просторі за рахунок вертикального зльоту. Крім того, вони можуть ефективно справлятися із завданнями на територіях міської забудови, є більш мобільними і добре тримають координати.
Зараз існує велика кількість дронів-квадрокоптерів. Найбільш ефективними з критерію ціна-якість є дрони виробництва КНР. Серед них достатньо привабливими для вирішення наших завдань у ціновому сегменті до 500дол. США є коптери фірм Xiaomi та Faith [1,2]– рис.1. Вони дозволяють здійснювати обльоти вимірюваних систем по заданій траєкторії на дистанціях до 10км на висотах до 800м, з швидкістю руху до 65км/год. Наразі достатньо широко використовуються на практиці для проведення розвідки та для вирішення інших завдань коптери фірми DJI [3] –рис.2.

Вони знаходяться у ціновому сегменті до 2000дол. США і можуть використовуватись на віддалях до 30км, при висоті польоту до 6000м і швидкості до 75 км/год.
Видно, що конструкції більшості дронів подібні. Вони дозволяють здійснювати підвіс еталонних відбивачів під корпусом. Правда для цього необхідно збільшити їх кліренс наростивши з пінополіуретану довжину посадочних штанг.
Основну труднощі складає проектування каліброваного відбивача з мінімальною вагою в НВЧ діапазонах хвиль. Коли розміри об’єкта спостереження суттєво перевищують довжину хвилі опромінення звичайно в якості еталонних відбивачів використовують для імітації великих ЕПР –кутові відбивачі з трикутними гранями σ_corner, а для імітації малих ЕПР сферичні відбивачі σsphere. Їх розрахункові ЕПР можна оцінити [4] з використанням співвідношень відповідно:
Де a – розмір грані кутового відбивача, d –діаметр сферичного, а λ довжина хвилі опромінюючого поля.
З використанням (1) оцінені розмірі кутового та сферичного відбивачів. Вони наведені в табл.1.
Таблиця 1 – Розміри грані кутового a, та діаметру сферичного d відбивачів в залежності від потрібної ЕПР при довжині хвилі опромінення 3см.
Аналіз наведених даних показує, що сферичні відбивачі доцільно використовувати для імітації цілей з ЕПР в десяті долі квадратного метру. Кутові відбивачі доцільно використовувати для імітації цілей з ЕПР більше одиниць квадратних метрів. Основна пелюстка діаграми зворотного розсіяння кутового відбивача має ширину [4]:

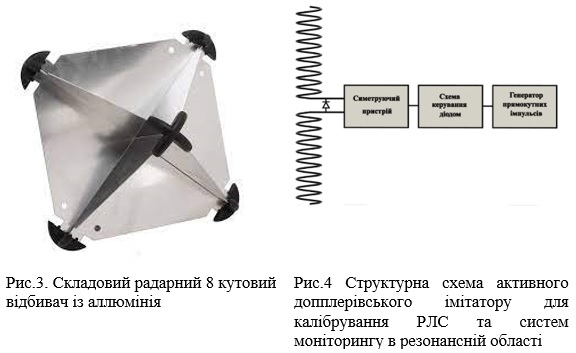
Для забезпечення більшої рівномірності діаграми зворотного розсіяння по азимуту та куту місця використовують системи з 4 або 8 кутових відбивачів-рис.3. Однак слід зазначити, що така конструкція навіть, коли виконується з алюмінію має вагу при ЕПР 1…10м2 більш ніж 0,5кг, що неприйнятно для коптеру. Подальше зниження ваги до декількох грамів досягається при виготовленні граней кутових відбивачів з фольгованого пінополіуретану. Оскільки сучасні БПЛА баражуючого типу мають достатньо малі розміри («Ланцет» «Герань 2» - не перевищують 1,5…3м) і виконані з композитних та вуглецевих матеріалів з використанням малої кількості металу, то їх ЕПР у НВЧ діапазоні мала - близько десятих квадратного метру. Тому наразі значно зріс інтерес до можливості використання випромінення віщальних станцій КХ а УКХ діапазонів для підсвічування обстановки в цих діапазонах. Коли довжина радіохвилі опромінення дорівнює приблизно половині, або чверті довжини хвилі [7,8] відбувається резонансне розсіяння з суттєвим зростанням ЕПР. Для баражуючих БПЛА це довжини хвиль 3…6м (частоти 100…50МГц). При цьому ЕПР буде дорівнювати або ЕПР напівхвилевого вібратору, або чверть хвильового заземленого вібратору [7,8]. Оскільки ЕПР напівхвилевого резонансного вібратору складає [4]:

то це означає, що в якості еталонного розсіювача в резонансній області можна для баражуючих БПЛА використовувати напівхвильові вібратори довжиною 5…3м. Для . щоб зменшити залежність ЕПР від поляризації опромінюючого поля потрібно два напівхвильові вібратори розташувати взаємно перпендикулярно як хрестоподібний вібратор, а третій чвертьхвильовий вібратор розташувати перпендикулярно їм в точці їх перетину. На відміну від кутового або сферичного відбивача вібратори можна розташовувати як зверху, так і знизу коптеру. Розглянутий нами підхід використовує еталонні відбивачі, розташовані на рухомому носії. Однак квадрокоптери мають, як правило, суттєво менші швидкості руху, ніж баражуючі БПЛА (для «Ланцета», наприклад 130км/год., а в момент атаки - до 300км/год.). Цього можна досягти, якщо якимось чином провести модуляцію відбитого розсіювачем сигналу частотою, яка буде відповідати частоті допплерівського зсуву.

де V – швидкість руху БПЛА.
Допплерівські зсуви частоти для УКХ діапазону будуть складати (4) 10…60 Гц. Експериментальні дослідження ЕПР вібраторів різної довжини та конфігурації на різних поляризаціях опромінення [7,8], що моделювали літальні апарати в резонансній області, показали, що ЕПР чверть хвильового вібратору приблизно на 14…16 дБ менше, ніж напів хвильового вібратору. Це означає, що комутуючи два вібратори за допомогою активного елементу ( p-i-n діоду, транзистору, або герконового реле) можна змінювати ЕПР конструкції від резонансної до приблизно на 14…16дБ меншої з частотою Допплера. Якщо для УКХ діапазону можна використовувати два комутуємих вібратори довжиною по 0,75….1,5м які можуть бути виконані як з трубок, так і металізованої кераміки. При переході в КХ діапазон, а резонансні частоти для винищувачів п’ятого покоління, які мають довжину 13…15 м, потрібно використовувати вібратори довжиною 6,5….7,5м, що достатньо складно. Експериментально було показано [5], що спіральна сповільнююча система має поперечне випромінення і дозволяє реалізувати коефіцієнт скорочення для напівхвилевого вібратору від 3,7 до 8,2 при відношенні діаметру спіралі до її довжини від 0.01 до 0.3. Причому спіральний вібратор є більш широкосмуговим. Слід відмітити, що частоти модуляції в цьому випадку будуть складати 2…4Гц. Структурна схема калібратору показана на рис. 4. Для вирівнювання поляризаційної залежності розсіяного сигналу можна, як і у попередньому випадку, використовувати хрестоподібні комутуємі вібратори.
Таким чином, для верифікації характеристик систем моніторингу повітряного простору та радіолокації можна використовувати рухомі носії типу квадрокоптерів, еталонних відбивачів у вигляді системи багатокутових систем у короткохвильовому діапазоні, або систем взаємно перпендикулярних напівхвилевих вібраторів у резонансній області.. Для імітації цілей з більшими ніж у квадрокоптерних носіїв швидкостями у резонансній області можна використовувати системи комутуємих активними елементами чверть хвильових вібраторів у УКХ діапазоні хвиль, або спіральних вібраторів поперечного випрмінювання в КХ діапазоні хвиль.
Список використаних джерел:
1. Квадрокоптер Xiaomi Fimi X8 SE 2022 (FMWRJ03A8) / Електронний ресурс https://uadron.com/p1700846176-kvadrokopter-xiaomi-fimi.html
2. Квадрокоптер C-FLY Faith 2S /Електронний ресурс https://uadron.com/ p1697206167-kvadrokopter-fly-faith.html?source=merchant_center&gclid= Cj0KCQjwk7ugBhDIARIsAGuvgPYco3EV89Xx8u0bY7FxVDqD_ML2g4OsVR6JDIQzdEVTAHyFBVzhjQ4aAvGhEALw_wcB
3. Квадрокоптер DJI Mavic 3 (CP.MA.00000447.02) / Електронний ресурс https://wmarket.com.ua/kvadrokopter-dji-mavic-3-cp-ma-00000447-02/?gclid=Cj0KCQjwtsCgBhDEARIsAE7RYh2kR9spkZqUapaiPigeYa9N-FlC6buPatteOJTG0nDrY2bu0mKKYDIaAlIQEALw_wcB
4. Кобак В.О. Радиолокационные отражатели. М.: «Сов. радио».-1975.-248с.
5. Мельяновский П. А. Спиральная антенна с поперечным излучением / П. А. Мельяновский, И. В. Попов // Радиофизика и электроника: сб. научн. тр. – 2003. – Т. 8, № 3. – Харьков. – С. 438-441.
6. Мельяновский П. А. Малогабаритный активный доплеровский калибратор / П. А. Мельяновский, И. В. Попов // 14th International Crimean Conference, Microwave and Telecommunication Technology, CriMico 2004, 13-17 September, 2004 P: 701-702.
7. Lutsenko V.I. Frequency Dependences of Target RCS at Decameter Wave lengths / Lutsenko V.I., Khomenko S.I. // Telecommunications and radio engineering,1997, N4, P.67-74
8. Lutsenko V. I. Frequency Dependences of Scattering Matrices in the Resonance Domain / V. I. Lutsenko, S. Y. Tolstel. // Telecommunication and Radio Engineering. - 2001. - V. 55, № 4. - Р. 33-39.
|